
 United Kingdom
United Kingdom
 France
France
 Germany
Germany
 Netherlands
Netherlands
 Sweden
Sweden
 USA
USA
 Italy
Italy
 Spain
Spain
More From Contributor








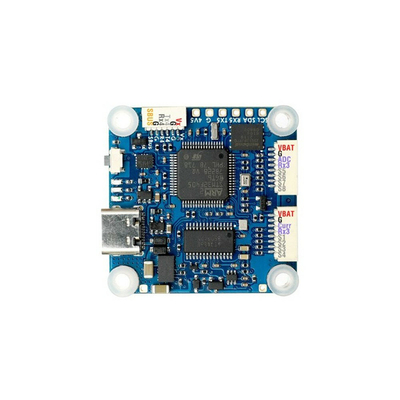
30.5*30.5mm Matek Système F405 Contrôleur De Vol HDTE 5V 1.5A BEC
Pour FPV Racing RC Drone
Traits:STM32F405 dispose dun flash de 1 Mo qui peut exécuter ArduPilot/INAV/BetaFlightInvenSense lIMU de 3ème génération ICM42688-P9-60V (3 ~ 12S LiPo) large tension dentrée et détection de tension. et un BEC 9 ~ 16V pour DJI OSD ou VTX analogique.8 moteurs + 3 servos dans le mélangeur multirotor INAV/BF.2x connecteur SH1.0_8pin pour PnP avec 2x ESC 4in11x connecteur SH1.0_6pin pour PnP avec système HD (Caddx VistaAir Unit)Sortie de broche USB pour la connexion à un adaptateur USB externe.Caractéristiques:Marque: MatekNom de larticle: contrôleur de vol HDTE F405.MCU: STM32F405RGT6IMU : ICM42688-POSD: AT7456E, DJI OSDBarre : SPL06-001 (I2C)Boîte noire : 16 Mo de mémoire Flash6x UART, 1x option Softserial_Tx12x sorties PWM (8x Dshot)1x I2C4x ADC (VBAT, courant, RSSI,
vitesse)2x PINIO2x connecteur SH1.0_8pin pour ESC 4in11x connecteur SH1.0_6pin pour le système HD (Caddx VistaAir Unit)3 LED pour FC STATUS (bleu, vert) et indicateur 3, 3V (rouge)Sortie 9 ~ 16 V (Vxs) commutable ON/OFFDouble signal de caméra analogique commutableDu pouvoir:Entrée: 9~60V (LiPo 3~12S)BEC: 5V 1.5ABEC: Vx, 9~16V/1~2A (3S IN/9V 2A, 4S IN/12V 2A, 6S IN/16V 2A, 8S IN/16V 1.5A, 12S IN/16V 1A)Capteur de tension Batterie: 1K:20K (échelle INAV 2100, BF échelle 210)Aucun capteur de courant intégré, prend en charge le capteur de courant externe de PDB / 4in1Firmware:ArduPilot : MatekF405-TEINAV : MATEKF405TEVol bêta : MATEKF405TEPhysiqueMontage: 30, 5 x 30, 5 mm, Φ4mm avec oeillets Φ3mmDimensions: 36 x 3
vitesse)2x PINIO2x connecteur SH1.0_8pin pour ESC 4in11x connecteur SH1.0_6pin pour le système HD (Caddx VistaAir Unit)3 LED pour FC STATUS (bleu, vert) et indicateur 3, 3V (rouge)Sortie 9 ~ 16 V (Vxs) commutable ON/OFFDouble signal de caméra analogique commutableDu pouvoir:Entrée: 9~60V (LiPo 3~12S)BEC: 5V 1.5ABEC: Vx, 9~16V/1~2A (3S IN/9V 2A, 4S IN/12V 2A, 6S IN/16V 2A, 8S IN/16V 1.5A, 12S IN/16V 1A)Capteur de tension Batterie: 1K:20K (échelle INAV 2100, BF échelle 210)Aucun capteur de courant intégré, prend en charge le capteur de courant externe de PDB / 4in1Firmware:ArduPilot : MatekF405-TEINAV : MATEKF405TEVol bêta : MATEKF405TEPhysiqueMontage: 30, 5 x 30, 5 mm, Φ4mm avec oeillets Φ3mmDimensions: 36 x 3



Product Description
Reviews/Comments
Add New
Vouchers
No voucher codes found.
Do you know a voucher code for this product or supplier? Add it to Insights for others to use.
Do you know a voucher code for this product or supplier? Add it to Insights for others to use.
 Denmark
Denmark