
 United Kingdom
United Kingdom
 France
France
 Germany
Germany
 Netherlands
Netherlands
 Sweden
Sweden
 USA
USA
 Italy
Italy
 Spain
Spain
More From Contributor









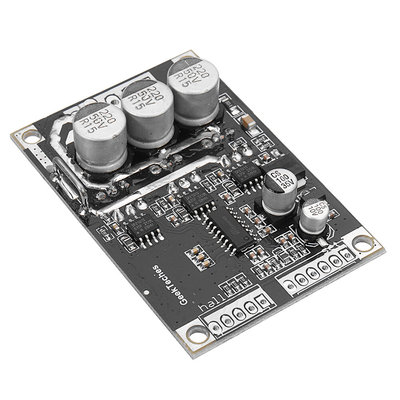
DC 12 V-36 V 15A 500 W Contrôleur De Moteur Sans Balais Hall BLDC
Pilote Conseil Support Moteur Hall
Spécification: Tension de fonctionnement: DC 12V-36VCourant de fonctionnement: = 15APuissance du pilote: = 500 WTension de vitesse: 0, 1 V-5 VTempérature de fonctionnement: -40 ~ 85 ° CHumidité: 90% HRProtection de décrochage: OuiActiver le contrôle: OuiProtection contre les surintensités: OuiCommande de direction: OuiSignal de contrôle de vitesse: OuiTaille: 63 x 42 x 17 mm (L xlx H); Taille de sonde 3 mm, longueur: entraxe du trou de fixation 57 mm; largeur: entraxe du trou fixe 36, 5 mm Sortie borne dalimentation: VCC (alimentation positive)GND (moins un)MC (phases moteur W)MB (phases moteur V)MA (phase moteur U) Réglé pour le côté commande: GND: masse de la borne de commandeVR: lextrémité du régulateur 0-5V (correspondant à 10% de la vitesse du moteur -100%)ZF:
commande dinversion (connectée à 5V ou la terre peut charger le sens de rotation du moteur)M: sortie impulsion tachymétrique (en fonction du nombre de pôles moteur correspondant au nombre dimpulsions par tour du numéro de sortie)EL: activer la borne de commande (connectée à 5V ot masse en marche puis 5V, mise à la terre du moteur sarrête)5V: borne de contrôle 5V HALL pour les terminaux du hall: 5V: puissance Hall positiveHa: signal HallHb: signal HallHc: Signal HallGND: Hall négatif Câblage: Terminal de commande pour SET: 1. Les méthodes de câblage du contrôle de la vitesse du moteur: la vitesse du système de potentiomètre disponible peut également être connectée à la commande MCU, lorsque le câblage de commande du p
commande dinversion (connectée à 5V ou la terre peut charger le sens de rotation du moteur)M: sortie impulsion tachymétrique (en fonction du nombre de pôles moteur correspondant au nombre dimpulsions par tour du numéro de sortie)EL: activer la borne de commande (connectée à 5V ot masse en marche puis 5V, mise à la terre du moteur sarrête)5V: borne de contrôle 5V HALL pour les terminaux du hall: 5V: puissance Hall positiveHa: signal HallHb: signal HallHc: Signal HallGND: Hall négatif Câblage: Terminal de commande pour SET: 1. Les méthodes de câblage du contrôle de la vitesse du moteur: la vitesse du système de potentiomètre disponible peut également être connectée à la commande MCU, lorsque le câblage de commande du p



Product Description
Reviews/Comments
Add New
Vouchers
No voucher codes found.
Do you know a voucher code for this product or supplier? Add it to Insights for others to use.
Do you know a voucher code for this product or supplier? Add it to Insights for others to use.
 Denmark
Denmark